Vol. 12 No. 2
©Derechos de autor reservados 2010
El programa de robótica TangibleK. Pensamiento computacional aplicado para niños pequeños
Sinopsis
En el presente artículo se describe TangibleK, programa de robótica para niños pequeños. Este programa, basado en más de una década de investigación, se cimienta en la creencia que instruir a niños sobre el mundo elaborado por seres humanos, es decir, el mundo de la tecnología y la ingeniería, es tan importante como instruirlos sobre el mundo natural, los números y las letras. El programa TangibleK se vale de la robótica como instrumento para estimular en niños el pensamiento computacional y el aprendizaje sobre el proceso de diseño de la ingeniería. Incluye un paquete de elementos robóticos, apropiado al desarrollo y diseñado basándose en la investigación, que pueden usar los niños para construir robots y programar sus comportamientos. El currículo se ha puesto a prueba en clases de kindergarten, campamentos de verano y laboratorios. La autora expone el sistema conceptual y teórico que informa TangibleK y las “ideas poderosas” de la ciencia de computación y la robótica en las cuales se cimienta el currículo, y los enlace a otras disciplinas y características del desarrollo de la primera infancia. El artículo concluye con una descripción de la pedagogía y actividades de las clases, junto con los instrumentos de evaluación utilizados para analizar los resultados del aprendizaje.
Introducción
Vivimos rodeados por la tecnología. Sin embargo, durante los primeros grados de la escuela primaria, los niños aprenden muy poco sobre dicho tema. Aunque es común ver a niños pequeños usar cartón o materiales reciclados para construir ciudades y puentes, y hacerse “pequeños ingenieros”, (Bers, 2008b), los currículos de la primera infancia se han enfocado durante décadas en la lectoescritura y las habilidades matemáticas, con cierto enfoque reciente en la ciencia. El programa de robótica TangibleK, descrito en la presente monografía, se cimienta en la creencia que instruir a niños sobre el mundo elaborado por seres humanos, es decir, el mundo de la tecnología y la ingeniería, es tan importante como instruirlos sobre el mundo natural, los números y las letras (Bers, 2008a). Sin embargo, lo singular en nuestro mundo actual de elaboración humana es la fusión de la electrónica y el software a estructuras mecánicas: la disciplina de la robótica.
Información de fondo sobre el programa de robótica TangibleK
Los robots y la robótica
Los robots ya no son creaciones de la ciencia ficción; pueden hallarse en muchos lugares. Tienen muchas formas, desde lo industrial hasta lo humanoide; y realizan tareas autónomas o programadas, como la limpieza de desechos radioactivos, procedimientos quirúrgicos y la producción de automóviles. No existe ningún consenso sobre las máquinas que pueden describirse como robots, pero existe la idea generalizada que los robots pueden realizar algunas o todas de las siguientes actividades: moverse, operar un brazo mecánico, percibir sensorialmente su ambiente y manipularlo, y manifestar comportamientos inteligentes y/o sociales que imitan los de humanos u otros animales (Craig, 2005).
La disciplina de la robótica les brinda a niños pequeños la oportunidad de aprender sobre la mecánica, sensores, motores, la programación y el mundo digital. Con la popularidad creciente de la robótica, el uso de paquetes instructivos de robótica se va difundiendo en centros de enseñanza secundaria media y superior y escuelas primarias (Roberts, Wendell y Foster, 2010). En la presente monografía describo un paquete de robótica para niños que incluye dos elementos: construcción en el mundo físico y programación de los comportamientos del artefacto construido para que interaccione con su entorno y responda a estímulos. Paquetes instructivos de robótica han sido desarrollados por empresas comerciales como LEGO y por laboratorios de investigación de diversas universidades (Rogers y Portsmore, 2004; Martin, Mikhak, Resnick, Silverman y Berg, 2000; Rusk, Resnick, Berg y Pezalla-Granlund, 2008).
En el laboratorio de investigación DevTech de la Universidad Tufts, con fondos de la National Science Foundation (Fundación Nacional de Ciencias), nos enfocamos en desarrollar paquetes de robótica que sean apropiados al desarrollo para el uso en la educación infantil (Horn, Crouser y Bers, en prensa). Al mismo tiempo, desarrollamos currículos y metodologías para traer la robótica a salones de clases (Bers y Horn, 2010; Bers, 2008a) y estudiamos resultados del aprendizaje realizado con el uso de la robótica en las clases. Nuestro planteamiento incluye estimular a niños pequeños a aprender jugando al invitarlos a construir sus propios proyectos robóticos, como coches que siguen una luz, elevadores que funcionan con sensores del toque y títeres que pueden tocar música (Bers, 2010). Los niños pequeños pueden hacerse ingenieros explorando engranajes, palancas, motores, sensores y circuitos de programación; pueden hacerse cuentacuentos creando sus propias construcciones que se mueven en reacción a su ambiente (Bers, 2008b; Wang y Ching, 2003).
La robótica puede servir de portal al aprendizaje de conceptos de la matemática aplicada, el método científico de investigación y la resolución de problemas (Rogers y Portsmore, 2004). Además, la robótica les invita a los niños a participar en interacciones sociales y negociaciones al jugar para aprender y aprender a jugar (Resnick, 2003). Los paquetes instructivos de robótica constituyen una generación nueva de manipulativos de aprendizaje que se basan en la tradición de Montessori y Fröebel, cuyos “manipulativos” y “regalos” iniciales estaban diseñados para ayudar a niños a desarrollar una comprensión más profunda de tales conceptos como el número, el tamaño y la forma geométrica (Brosterman, 1997). Actualmente, la mayoría de los programas para niños pequeños incluyen varitas de Cuisenaire, bloques geométricos, DigiBlocks y otros manipulativos, cuidadosamente diseñados para ayudar a niños a construir y hacer experimentos. Recientemente, “manipulativos digitales” expanden la gama de conceptos que niños pueden explorar; investigadores han incorporado la capacidad de computación a tales juguetes como bloques, cuentas y pelotas, para que niños pequeños puedan aprender sobre procesos dinámicos y “conceptos sistemáticos”, como la retroacción y la emergencia, que previamente se consideraban demasiado avanzados para niños (Resnick, Berg y Eisenberg, 2000).
Dentro de esta tradición, la robótica presenta una oportunidad de introducirles a niños el mundo de la tecnología y la ingeniería. Los manipulativos robóticos les invitan a niños a participar en actividades que desarrollan la motricidad fina y la coordinación de ojos y manos, además de la colaboración con equipos. También ofrecen un modo concreto y tangible de entender ideas abstractas (Bers, 2008a). Por ejemplo, al jugar con partes mecánicos para diseñar sus creaciones robóticas, los niños exploran palancas, articulaciones y motores, y construyen máquinas simples. Al agregar engranajes a sus máquinas, empiezan a explorar el concepto matemático de la proporción.
La programación de computadoras, el pensamiento computacional y los niños
El trabajo de la robótica incluye mucho más que la construcción de artefactos físicos. Hacer que robots “cobren vida” implica la programación de computadoras. Así que los niños aprenden a crear programas computarizados: algoritmos o secuencias de instrucciones que permiten que los robots se muevan y que perciban y respondan a sus entornos.
El trabajo con la programación de computadoras con niños comenzó hace varias décadas en el Laboratorio de Inteligencia Artificial del Instituto Tecnológico de Massachusetts (MIT, siglas en inglés), el cual más tarde se convirtió en el laboratorio Logo cuando Seymour Papert desarrolló una tortuga para el piso que niños podían controlar usando Logo, lenguaje de programación basado en el texto (Bers, 2008a). La investigación reciente ha demostrado que niños de tan solo 4 años pueden entender conceptos básicos de programación de computadoras y pueden construir robots simples (Bers, Ponte, Juelich, Viera y Schenker, 2002; Cejka, Rogers y Portsmore, 2006). Los estudios iniciales de Logo mostraron que cuando se enseña en forma estructurada la programación de computadoras, se puede ayudar a niños pequeños a mejorar la memoria visual y el sentido numérico básico, además de desarrollar técnicas de resolución de problemas y habilidades lingüísticas (Clements, 1999). Investigaciones realizadas por Papert (1980) y Resnick (1996) también han demostrado que aprender a programar computadoras puede producir cambios en la manera de pensar de uno.
El pensamiento computacional es cierto tipo de pensamiento analítico que tiene mucho en común con el pensamiento matemático (por ej., la resolución de problemas), el pensamiento de la ingeniería (procesos de diseñar y evaluar) y el pensamiento científico (el análisis sistemático). El término emergió del trabajo pionero de Papert y sus colegas sobre ambientes de programación construccionistas y basados en el diseño; se refiere a maneras de resolver problemas según algoritmos y a la adquisición de habilidad en relación con lo tecnológico (Papert, 1980, 1993). El cimiento del pensamiento computacional es la abstracción: abstraer conceptos de casos, y evaluar y escoger la abstracción “correcta”. Depende de la selección de datos ingresados o inputs (es decir, la manipulación de variables e instrucciones de computación), la observación de efectos producidos o outputs (datos de resultados) y el discernimiento de lo que ocurre en el lapso intermedio. El pensamiento computacional implica las habilidades de abstraer de las instrucciones computacionales (los lenguajes de la programación) a los comportamientos computacionales, de identificar defectos y lugares de error potenciales, y de escoger los detalles a hacer resaltar, retener o eliminar en el algoritmo de inputs, computación y outputs (Wing, 2006).
Investigaciones previas sobre el pensamiento computacional en niños de los grados de primaria pueden encontrarse en la literatura sobre ambientes de programación construccionistas (Repenning, Webb y Ioannidou, 2010; Resnick et al., 2009). Wing (2006) describe el pensamiento computacional como habilidad fundamental para todo el mundo, no solo los profesionales del ámbito de la informática:
A la lectura, escritura y aritmética, debemos agregar el pensamiento computacional en la habilidad analítica de cada niño. Así como la imprenta facilitó la difusión de la lectoescritura y el conocimiento matemático, […] la computación y las computadoras facilitan la difusión del pensamiento computacional. El pensamiento computacional implica resolver problemas, diseñar sistemas y comprender el comportamiento humano, basándose en los conceptos fundamentales de la informática. (Wing, 2006, pág. 33).
En resumen, el término “pensamiento computacional” se refiere a una gama de instrumentos mentales que reflejan la amplitud del ámbito científico de la informática.
El programa de robótica TangibleK
Objetivos del programa y preguntas de investigación
TangibleK Robotics es un programa instructivo de robótica con el que se han realizado pruebas preliminares con niños y maestros en clases de pre-kindergarten hasta segundo grado. Consta de un currículo, documentos de evaluación y un paquete de construcción robótica con una interfaz apropiada al desarrollo. El currículo y el paquete van destinados especialmente a enseñarles a niños pequeños un conjunto específico de estrategias mentales: ideas y habilidades poderosas que resultan útiles para aplicar el pensamiento computacional en un contexto de la robótica.
No se sabe lo suficiente en la actualidad sobre cómo el trabajo con tecnologías nuevas puede estimular el pensamiento computacional en niños pequeños ni cuáles tipos de trayectoria de aprendizaje producen los mejores resultados. Averiguar esto es el objetivo del programa de investigación de TangibleK, el cual explora tanto facetas del aprendizaje como cuestiones del diseño de la interfaz computarizada, por ejemplo lenguajes tangibles de programación.
Tres preguntas de investigación constituyen la médula de la investigación con TangibleK:
- ¿Cuáles son las trayectorias del pensamiento computacional de niños pequeños cuando están expuestos a un programa instructivo de robótica?
- ¿Cuáles conceptos y habilidades de la programación robótica pueden los niños pequeños desarrollar, y cuáles mecanismos de apoyo necesitan, tanto curriculares como tecnológicos?
- ¿Cuáles elementos del diseño debe incluir un paquete de robótica apropiado al desarrollo para permitir que niños pequeños participen en una experiencia exitosa de aprendizaje?
La envergadura de la presente monografía no alcanza estas preguntas de investigación; más bien, describimos el programa instructivo TangibleK que posibilita nuestra exploración de dichas preguntas. Más información sobre el programa y acceso al currículo, la tecnología y monografías de investigación, pueden hallarse en http://ase.tufts.edu/DevTech/tangiblek/.
Desarrollo Tecnológico Positivo (Positive Technological Development, o PTD). Cimiento teórico del programa
El sistema conceptual Desarrollo Tecnológico Positivo (Positive Technological Development, o PTD) constituye el cimiento teórico del programa. PTD es un método interdisciplinario que integra la investigación de ciencias aplicadas de desarrollo y desarrollo juvenil positivo a ideas de la comunicación mediada con computadoras, el aprendizaje cooperativo con apoyo de computadoras y el aprendizaje construccionista con tecnología. PTD es una extensión natural de los movimientos de instrucción digital (computer literacy en inglés) y habilidad tecnológica (technological fluency en inglés) que han influido en la tecnología instructiva (Pearson y Young, 2002) al agregar componentes psicosociales y éticos a los cognitivos (Bers, 2008a; Bers, 2006; Bers, Doyle-Lynch y Chau, en prensa). El PTD examina las tareas adaptadas al nivel del desarrollo que encuentra un niño que se cría en nuestra era digital, y ofrece un modelo para desarrollar y evaluar programas enriquecidos con tecnología. También informa el diseño y la evaluación de programas y experiencias instructivos de tecnología que van destinados a ayudar a jóvenes a usar la tecnología de maneras positivas para aprender cosas nuevas, expresarse creativamente, comunicarse, cuidar de sí mismos y otros, y contribuir a una comunidad a la vez que desarrollan su propia percepción de identidad cimentada en valores personales y morales. Dos conjuntos de investigación, el construccionismo y el Desarrollo Juvenil Positivo (Positive Youth Development en inglés), han influido en el sistema conceptual PTD.
Construccionismo. El construccionismo radica en el camino intelectual iniciado en la década de 1960 por el Grupo Logo de MIT bajo la dirección de Seymour Papert (Bers et al., 2002). El construccionismo tiene cuatro “puntales”. El primero es la creencia en métodos instructivos que enfatizan aprender participando directamente. Cimentado fuertemente en el constructivismo de Piaget, el construccionismo enfatiza el uso de tecnologías nuevas para ayudar a niños a aprender construyendo, investigando activamente y jugando. El segundo “puntal” construccionista es el reconocimiento de la importancia de objetos físicos para apoyar el desarrollo de maneras concretas de pensar y aprender sobre fenómenos abstractos. Las computadoras y los paquetes de construcción de robots toman un papel central como herramientas poderosas para diseñar, crear y manipular objetos tanto del mundo real como del virtual. El tercer puntal del construccionismo es la comprensión que las ideas poderosas pueden dar poder al individuo. Una “idea poderosa” es un concepto central de un ámbito que es útil epistemológica y personalmente, está entrelazada a otras disciplinas y tiene raíces en el conocimiento intuitivo que el niño ha interiorizado desde hace mucho tiempo (Papert, 2000; Bers et al., 2002). Los construccionistas conceptuaban la computadora como vehículo poderoso de nuevas ideas que brindan maneras nuevas de pensar, de poner en práctica el conocimiento y de formar conexiones personales y epistemológicas con otras áreas de conocimiento (Papert, 2000). El cuarto puntal construccionista es el reconocimiento de la importancia de la auto-reflexión. Desde una perspectiva construccionista, la programación de una computadora representa un modo poderoso de adquirir una perspicacia nueva sobre cómo funciona la mente y de reflexionar sobre el propio proceso de pensamiento y la propia relación intelectual y emocional con el conocimiento (Papert, 1993; Kafai y Resnick, 1996).
El construccionismo de Papert alcanzó en 1980 una amplia difusión en el mundo de la pedagogía con la publicación de su libro pionero, Mindstorms: Children, Computers, and Powerful Ideas (Desafío a la mente. Los niños, las computadoras y las ideas poderosas. Papert, 1980). En Mindstorms, Papert abogó por darles a niños oportunidades de programar computadoras a fin de aprender de la matemática y, más importante, aprender sobre el propio aprendizaje. Por medio del proceso de diseñar y reparar defectos de programas informáticos (objetos externos de reflexión), los niños no sólo desarrollarían el pensamiento computacional sino también un método meta-cognitivo de resolver problemas y aprender.
Desarrollo Juvenil Positivo (Positive Youth Development, o PYD). La investigación sobre el programa de robótica TangibleK se enfoca en las relaciones dinámicas entre individuos y sus contextos, y enfatiza los talentos y recursos de los jóvenes en vez de enfocarse en disminuir o prevenir sus comportamientos arriesgados (Damon, 2004; Larson, 2000; Theokas y Lerner, 2006; Scales, Benson, Leffert y Blyth, 2000). El término “positivo” señala el fomento de características y actividades valoradas (es decir, recursos del desarrollo) que guiarían al joven hacia una buena trayectoria del desarrollo (por ej., el mejoramiento de uno mismo y de la sociedad). Lerner, Almerigi, Theokas y Lerner (2005) describen los recursos del desarrollo del modelo PYD como las “seis ces” (según las siglas en inglés): aptitud, confianza, carácter, conexión, altruismo y contribución, recursos que se perciben como caminos al fomento de comunidades florecientes y sanas.
El Desarrollo Tecnológico Positivo (PTD), formado tanto por el construccionismo como por el Desarrollo Juvenil Positivo, es un sistema conceptual multidimensional que hace relevantes las “seis ces” en nuestro mundo digital. Enfatiza no sólo los recursos del desarrollo sino también comportamientos positivos apoyados por la tecnología: creación del contenido, creatividad, comunicación, colaboración, formación de comunidades y decisiones sobre la conducta (Bers et al., en prensa). Como sistema conceptual para el diseño e implementación de programas instructivos, PTD toma en cuenta el ambiente de aprendizaje y las prácticas pedagógicas y los valores culturales y ritos que median la enseñanza y el aprendizaje (Rogoff, 2003; Rogoff, Turkanis y Bartlett, 2001). Se describirán más tarde elementos del sistema conceptual presentado en la Figura 1.
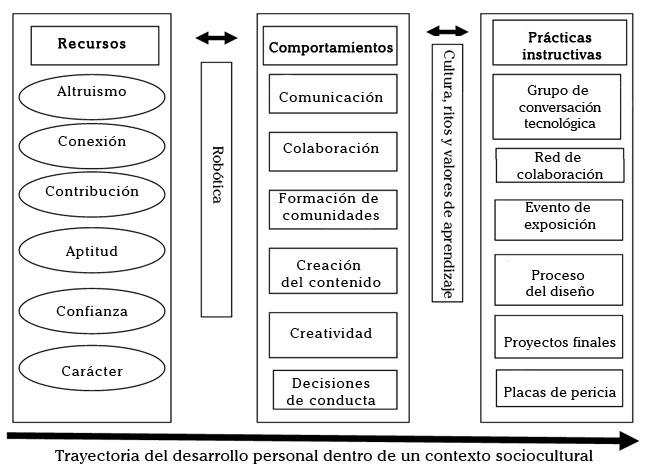
Figura 1. El sistema conceptual de PTD, que incluye Recursos, Comportamientos y Prácticas instructivas.
TangibleK y el sistema conceptual PTD
Como sugiere la Figura 1, el programa de robótica TangibleK trata las “seis ces”, o los recursos, del Desarrollo Juvenil Positivo que aparecen en la columna a la izquierda mediante prácticas instructivas específicas, enumeradas en la columna derecha, que les ofrecen a alumnos jóvenes la oportunidad de realizar comportamientos específicos asociados a trabajar con la tecnología, enumerados en la columna central.
Creación del contenido. El programa TangibleK implica la creación del contenido: a saber, un niño elabora un artefacto robótico y programa sus comportamientos. El proceso de diseño e ingeniería de la construcción, y el pensamiento computacional necesario para programar, fomentan la aptitud del niño con las computadoras y la tecnología. La práctica instructiva de requerir que los niños escriban en diarios durante el proceso de crear robots ayuda a hacer transparentes para los niños (y para los maestros y padres) sus propios pensamientos, sus trayectorias de aprendizaje y la evolución del proyecto a través del tiempo. De modo similar al método científico, los pasos formales del proceso de diseño e ingeniería (plantear un problema, hacer investigación, planear, desarrollar un prototipo, ponerlo a prueba, volver a diseñarlo y relatar las soluciones) les ofrecen a los alumnos un modo de tratar sistemáticamente un problema. Los diarios de diseño de TangibleK pueden ofrecerles a niños caminos más o menos estructurados para navegar el proceso desde la idea hasta el producto al darles un andamio de dichos pasos formales. Un diario puede contener hojas de trabajo para tratar todos los pasos del proceso de diseño, o simplemente páginas en blanco para estimular la imaginación; los mejores contienen una combinación de ambas. Esta individualización es importante; algunos niños necesitan los límites y el planeamiento efectuado por el liderazgo para trabajar eficazmente. A otros no les gusta planear de antemano; pueden clasificarse como estudiantes “remendones” y “bricoleros” (Turkle y Papert, 1992) que mantienen diálogos y negociaciones con la tecnología; les gusta trabajar sin parámetros y entretenerse con los materiales para formarse ideas al crear, diseñar, construir y programar. Ambos estilos epistemológicos conducen a aumentar la aptitud con lo tecnológico.
Creatividad. El método de TangibleK se cimienta en el fomento de la creatividad, en contraste con la eficiencia, en la resolución de problemas; el método es formado por el significado original del término ingeniería, derivado del término latín ingenium que significa “cualidad innata, poder mental, inventiva hábil” (Random House Webster’s Unabridged Dictionary, 2006). El programa integra tales medios como bloques LEGO, motores, sensores, materiales reciclables, materiales de arte y artesanía, y elementos gráficos del lenguaje de programación. Durante el proceso de resolver problemas técnicos de maneras creativas con estos medios, los niños desarrollan la confianza en cuanto a su potencial de aprendizaje. Sin embargo, los proyectos inteligentes o creativos pueden ser difíciles de elaborar, y el proceso puede ser frustrante: después de muchos intentos, la mandíbula del cocodrilo robótico de una niña tal vez no se abre todavía, o su coche puede descomponerse cada vez que dobla a la izquierda. Para evitar la frustración, algunos maestros escogen con cuidado los proyectos en que los niños van a trabajar o les dan instrucciones con pasos enumerados. Tales estrategias pueden proteger a los niños de lo que Alan Kay describe como la “diversión difícil” del aprendizaje creativo (Kay, 2003). Más bien, el método de TangibleK se propone a ayudar a niños a aprender a manejar la frustración; un paso importante para desarrollar la confianza en la propia capacidad de aprender. El ambiente de aprendizaje está arreglado para crear una cultura en que se espera que las cosas tal vez no funcionen, y en la que alcanzar el éxito en el primer intento se ve como algo raro, tal vez como indicio de que un niño no se haya planteado suficientes desafíos. A medida que los niños progresan por el programa, poco a poco se dan cuenta de su capacidad de hallar soluciones haciendo múltiples intentos, utilizando estrategias diferentes o pidiendo ayuda (Bers y Horn, 2010).
Colaboración. La mayoría de los programas instructivos de robótica para niños mayores, como National Robotics Challenge (Desafío Nacional de Robótica) y FIRST (For Inspiration and Recognition of Science and Technology, o Para Inspiración y Reconocimiento de la Ciencia y la Tecnología), están concebidos como competiciones en las que los robots tienen que llevar a cabo una determinada tarea, usualmente con la meta de superar otros robots. Sin embargo, la investigación ha mostrado que las niñas no tienden a reaccionar bien ante estrategias instructivas que enfatizan la competición (Turbak y Berg, 2002); además, tales estrategias tal vez no siempre sean apropiadas en clases para niños pequeños (Bers, 2008a). El ambiente de aprendizaje de TangibleK, en vez de enfocarse en la competición, anima a los niños a colaborar con equipos, compartir recursos e interesarse unos por otros. El uso de redes de colaboración fomenta la colaboración. Al principio de cada día cada niño o niña recibe, junto con el diario de diseño, una hoja impresa personalizada con su fotografía en el centro, y las fotografías y los nombres de todos los demás niños de la clase arreglados en un círculo alrededor de la foto central (véase la Figura 2). A lo largo del día, con la inducción del maestro, cada niño dibuja líneas para conectar su propia foto con las fotos de los niños con quienes ha colaborado. (La colaboración se define aquí como recibir o dar ayuda con un proyecto, programar juntos, dar o pedir prestados materiales, o colaborar en una tarea común). Al final de la semana, los niños escriben o dibujan “tarjetas de agradecimiento” dirigidas a los niños con quienes han colaborado más.
Figura 2. Ejemplar de una red de colaboración en blanco.
Comunicación. La comunicación es una característica importante del método de TangibleK, el cual incluye mecanismos que fomentan una percepción de conexión con los compañeros de clase o entre alumnos y adultos. Una característica que anima la comunicación es la de los grupos de conversación tecnológica. Durante las reuniones de dichos grupos los niños y adultos dejan de trabajar, ponen sus proyectos en la mesa o el piso, se sientan juntos en un círculo y relatan el estado actual de sus proyectos (Bers, 2008a). Esto es similar a otras conversaciones grupales a las que los niños están expuestos en el kindergarten (Kantor, Elgas y Fernie, 1989). Los grupos de conversación tecnológica brindan una oportunidad de corregir errores como comunidad; es decir, resolver problemas técnicos de programación o construcción. El maestro inicia la conversación grupal pidiendo que los niños exhiban sus proyectos y haciendo preguntas como: “¿Qué resultó como esperaban y qué no resultó?”, “¿Qué intentan lograr?” o “¿Qué necesitan saber para hacer que ocurra eso?” El maestro entonces aprovecha los proyectos y las preguntas de los niños para enfatizar ideas poderosas ilustradas por los proyectos. El currículo emerge según el conocimiento que necesita esta comunidad de aprendizaje en particular. Este método ofrece la información técnica según la demanda y las necesidades que emerjan, y constituye una alternativa a las lecturas. Los grupos de conversación tecnológica pueden reunirse tan frecuentemente como cada 20 minutos al comienzo de un proyecto o solamente una vez al final del día, según las necesidades de los niños y los planes del maestro para introducir conceptos nuevos.
Formación de comunidades. Las técnicas de formación de comunidades en los programas de TangibleK apoyan el desarrollo de redes de apoyo que fomenten la contribución que hace cada niño al ambiente de aprendizaje y la comunidad. De acuerdo con el espíritu del método de Reggio Emilia, iniciado en centros municipales para bebés y preescolares en Reggio Emilia (Italia) después de la II Guerra Mundial, los proyectos de los niños se comparten con la comunidad con un evento de exposición, día de demostraciones o exhibición (Rinaldi, 1998). Un evento de exposición les ofrece a los niños oportunidades auténticas de relatar y celebrar los procesos y los productos tangibles de su aprendizaje junto con otros interesados en su aprendizaje, como familiares, amigos y personas de la comunidad. Estas exhibiciones públicas hacen visible el aprendizaje para otros y para los niños mismos.
Decisiones de conducta. Las actividades de TangibleK les brindan a niños oportunidades de hacer experimentos con preguntas como “¿Qué pasa si…?” y considerar las consecuencias potenciales de las propias decisiones. Las decisiones sobre la conducta no solo son tomadas por los niños; los maestros también toman decisiones importantes que afectan lo que hacen los niños. Por ejemplo, si los bloques LEGO están clasificados según el tipo y colocados en cubos en el centro del salón de clases en vez de ser repartidos a cada niño o grupo, clasificados de antemano en un paquete de robótica, los niños aprenden a tomar lo que necesitan sin vaciar los cubos de los bloques “más buscados”, como sensores especiales o los muñequitos coloridos de LEGO. También aprenden a negociar a favor de lo que necesitan. A los maestros que usan el programa TangibleK, ayudar a los niños a desarrollar un sentido moral interior que oriente sus acciones de manera justa y responsable les importa tanto como el enfoque en aprender sobre la robótica. El énfasis del programa en decisiones de conducta puede provocar un análisis de los valores y una exploración de los rasgos del carácter. La diferenciación de papeles puede ser importante para el desarrollo de una comunidad responsable de aprendizaje. En cualquier clase, por ejemplo, cierto niño puede aprender muy rápidamente sobre la mecánica mientras que otro puede hacerse perito en programación y aún otro puede resolver problemas fácilmente o mediar hábilmente conflictos entre los integrantes de grupos. A tales niños los maestros o los compañeros de clase les pueden asignar “placas de pericia”. Aquellos niños que se perciben como especialmente hábiles en algo pueden tomar la decisión de ayudar a sus compañeros a construir una estructura más grande o tratar otras dificultades. También se anima a que los niños se prueben papeles nuevos y sean flexibles; existe una placa para un “perito en poner a prueba cosas nuevas”.
Descripción general del currículo de TangibleK
El currículo de TangibleK introduce y utiliza en un contexto de la robótica, de manera estructurada y apropiada al desarrollo, seis ideas poderosas de la informática: la robótica; el proceso del diseño e ingeniería; el secuenciar y las estructuras de control; circuitos y parámetros; sensores; y bifurcaciones. Vea la Tabla 1 para una descripción de dichos conceptos. Hay varios temas en las versiones preliminares de este currículo, como el transporte, la comunidad y los animales; pero las ideas poderosas de la informática y la robótica siguen iguales. Se utiliza aquí el currículo del transporte a modo de ejemplo.
| Idea poderosa | Definición | Actividad | Conexiones a otras disciplinas |
|---|---|---|---|
Robótica |
La disciplina de la ingeniería que se enfoca en la creación y programación de robots, máquinas que pueden seguir instrucciones y moverse independientemente para llevar a cabo tareas. |
¿Qué es un robot? Tras una introducción a la robótica en la que los niños miran diversos robots y hablan sobre las funciones de los mismos, construyen sus propios vehículos robóticos y exploran los componentes e instrucciones que pueden usar para programarlos. |
|
Proceso de diseño e ingeniería |
Proceso utilizado para desarrollar productos a fin de satisfacer una necesidad o resolver un problema. Hay varios pasos iterativos: identificar una necesidad o definir el problema, investigar, analizar soluciones posibles, desarrollar el producto, comunicarse y exhibir el producto. |
Construcción fuerte: los niños construyen un vehículo no robótico para llevar muñecos pequeños de casa a la escuela. El vehículo necesita ser fuerte y capaz de realizar las funciones para las que se diseñó. |
|
Secuenciar/ Estructuras de control |
Una secuencia de instrucciones puede ser expuesta por un programa y realizada según la secuencia por un robot. Cada bloque tiene un significado concreto. La secuencia de los bloques es importante. |
El Hokey-Pokey: se escogen las instrucciones adecuadas y se los arregla según una secuencia para programar un robot de modo que baile el “Hokey-Pokey”. |
|
Circuitos y parámetros |
Una secuencia de instrucciones puede modificarse para ocurrir repetidas veces. Las instrucciones de estructura de control pueden cambiarse con información adicional. Por ejemplo, los circuitos pueden modificarse para repetirse sin fin o un número concreto de veces. |
Muchas veces hasta que te digo que pares: los alumnos usan un par de bloques de circuito (repeat/repetir y end repeat/dejar de repetir) para hacer que el robot se adelante una y otra vez, al principio infinitas veces y más tarde, la cantidad adecuada de veces para llegar a un destino fijo. |
|
Sensores |
Un robot puede usar sensores, parecidos a los órganos sensoriales humanos, para recoger datos de sus entornos. Los datos de los sensores pueden usarse para controlar cuándo el robot sigue las instrucciones que recibe. |
Atravesar el túnel: los niños usan sensores de luz e instrucciones para programar un robot de modo que encienda las luces cuando se halla en entornos oscuros y viceversa. |
|
Bifurcaciones |
En una bifurcación del programa, un robot puede seguir uno u otro conjunto de instrucciones dependiendo del estado de cierta condición. |
El robot decide: los alumnos programan sus robots para que viajen a uno de dos destinos dependiendo de información de sensores de luz o de contacto. |
|
El currículo TangibleK requiere como mínimo 20 horas de trabajo en el salón de clases, divididas en las siguientes sesiones estructuradas basadas en las seis ideas poderosas enumeradas arriba:
- Sesión 1. Construcción fuerte (el proceso de diseño e ingeniería)
- Sesión 2. ¿Qué es un robot? (los robots tienen componentes especiales para seguir instrucciones)
- Sesión 3. El Hokey-Pokey: secuencia de instrucciones (la secuencia o el orden de las instrucciones es importante)
- Sesión 4. Muchas veces hasta que te digo que pares (circuitos y parámetros numéricos)
- Sesión 5. A través del túnel (sensores y circuitos)
- Sesión 6. El robot decide (sensores y bifurcaciones)
En la Tabla 2 se describen las seis lecciones del currículo, con objetivos de aprendizaje que describen lo que los alumnos deben entender y lo que deben ser capaces de hacer.
| Lección | Alumnos entenderán que… | Alumnos serán capaces de… |
|---|---|---|
Construcción fuerte (el proceso de diseño e ingeniería) |
|
|
¿Qué es un robot? (los robots tienen componentes especiales para seguir instrucciones) |
|
|
El Hokey-Pokey (la secuencia o el orden de las instrucciones es importante) |
|
|
Muchas veces hasta que te digo que pares (circuitos y parámetros numéricos) |
|
|
A través del túnel (sensores y bucles) |
|
|
El robot decide (sensores y bifurcaciones) |
|
|
Cada sesión sigue un formato básico similar: (1) juegos de calentamiento mental para introducir de manera juguetona el concepto o la idea poderosa nueva, (2) una tarea de construcción y/o programación para reforzar la idea poderosa que fundamenta la lección, (3) trabajar en un proyecto pequeño, individualmente o en parejas, que utiliza en un contexto nuevo la idea poderosa, (4) el grupo de conversación tecnológica y (5) la evaluación.
Después de las seis sesiones de TangibleK, le toca a la clase crear un proyecto final. Esto ofrece la oportunidad de revisar las habilidades y los conceptos aprendidos y aplicarlos a un proyecto escogido por los niños mismos. La cantidad de tiempo que duren tales proyectos varía según la clase y los objetivos, las expectativas y los requisitos curriculares del maestro. Dichos proyectos finales se expondrán en un evento para la comunidad mayor.
Ejemplos de los proyectos finales de los niños para TangibleK incluyen una ciudad robótica, un zoológico con animales móviles, un parque de dinosaurios, un circo y un jardín con flores robóticas que reaccionaban ante diversos sensores (Bers, 2008a). Todos los proyectos incorporaban el uso de materiales reciclables baratos. Por ejemplo, cierta clase de kindergarten en Boston, después de hacer una excursión a la zona histórica de esta ciudad, construyó un Camino de la Libertad robótico usando cajas de cartón para representar los edificios históricos de la ciudad. Agregaron sensores de luz y motores a las cajas para hacer que sus edificios “cobraran vida” (Bers, 2008a).
Descripción general de la tecnología robótica de TangibleK
Una de las preguntas de investigación que el programa de robótica TangibleK se propone a explorar es: “¿Cuáles elementos del diseño debe incluir un paquete de robótica apropiado al desarrollo para permitir que niños pequeños participen en una experiencia exitosa de aprendizaje?” El programa TangibleK se basa en evidencia recogida durante casi una década de investigación con niños pequeños y actividades de robótica (Bers, 2000; Cejka et al., 2006; Bers, 2008a). Durante ese tiempo, se han diseñado, implementado y evaluado diversas interfaces y tecnologías (Martin et al., 2000), pero no se ha realizado ningún esfuerzo constante por crear interfaces que sean apropiadas al desarrollo de niños pequeños. El programa TangibleK se basa en el ámbito de la interacción entre humanos y computadoras (HCI, o human-computer interaction) sobre interfaces tangibles, las cuales demuestran que al ofrecer sistemas tangibles, se pueden superar las limitaciones inherentes de escribir programas de computación con un teclado o un ratón (Blikstein, Buechley, Horn y Raffle, 2010).
Un lenguaje tangible de programación, como lenguajes basados en texto e iconos, es una herramienta para dar instrucciones a una computadora. También existen sistemas híbridos. Con un lenguaje basado en el texto, un programador usa palabras como BEGIN (empezar), IF (si) y REPEAT (repetir) para dar instrucciones a una computadora. Este código debe escribirse de acuerdo a reglas sintácticas estrictas y frecuentemente frustrantes. LOGO es un ejemplo de un lenguaje basado en texto para niños (Papert, 1980). Un lenguaje visual o basado en iconos reemplaza palabras con imágenes; los programas se expresan al arreglar y conectar iconos en la pantalla de la computadora con el ratón. Robolab (Rogers y Portsmore, 2004) y SCRATCH (Resnick et al., 2009) son lenguajes de programación basados en iconos para niños. Las reglas sintácticas todavía deben seguirse pero se le pueden comunicar al programador con un conjunto de indicios visuales.
Con los lenguajes tangibles, en vez de usar imágenes y palabras en la pantalla de una computadora, los usuarios arreglan y conectan objetos físicos para construir programas de computación. Los lenguajes tangibles explotan propiedades físicas de objetos (el tamaño, la forma geométrica, los materiales etc.) para expresar y hacer valer la sintaxis. La idea de la programación tangible se describió primero a mediados de la década de 1970 (Perlman, 1976) y se restableció casi dos décadas más tarde (Suzuki y Kato, 1995). Desde entonces se han creado varios lenguajes tangibles en laboratorios de investigación de todas partes del mundo (por ej., McNerney, 2004; Wyeth, 2008; Smith, 2007; Horn y Jacob, 2007).
En la Universidad Tufts, varios investigadores han usado un método híbrido que permite que los niños alternen entre lenguajes de programación tangibles y los basados en la pantalla (Bers y Horn; 2010). Este sistema, denominado CHERP (Creative Hybrid Environment for Robotic Programming, o Ambiente Creativo Híbrido para Programación Robótica), permite que los niños hagan la programación con bloques de madera que pueden armarse (Figura 3). Los niños pueden alternar entre los bloques y programas que presentan imágenes de los bloques en la pantalla de una computadora para representar acciones que los robots realizarán. Este planteamiento híbrido permite que los niños trabajen con múltiples representaciones (Horn et al., en prensa).

Figura 3. Elementos tangibles y visuales del lenguaje CHERP, desarrollado en la Universidad Tufts.
CHERP utiliza una colección de técnicas de procesamiento de imágenes para convertir programas físicos en instrucciones digitales. Cada bloque del lenguaje lleva impreso un símbolo circular denominado un TopCode (código de la parte superior) (Horn, Bers y Jacob, 2009). Dichos códigos permiten que se determinen rápidamente a partir de una imagen digital la posición, la orientación, el tamaño, la forma y el tipo de cada instrucción. Una cámara web regular, conectada a una computadora de mesa o portátil, saca una fotografía del programa. Un compilador convierte la foto en un código digital que se baja al robot en pocos segundos (véase la Figura 4).
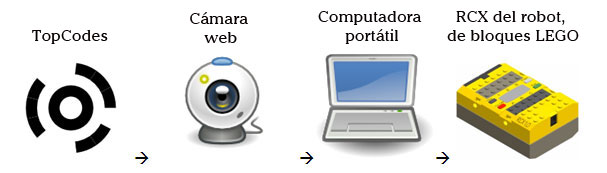
Figura 4. El proceso de bajar un programa en el lenguaje CHERP.
El programa TangibleK utiliza el CHERP junto con varios paquetes robóticos. Los programas que los niños crean con los bloques tangibles pueden bajarse al componente RCX de bloques LEGO, que contiene una microcomputadora que funciona del “cerebro del robot” y se incluye en el paquete Mindstorms de LEGO. Los investigadores de la Universidad Tufts exploran el uso de otros paquetes de robótica que tal vez no incluyan bloques LEGO, por lo que serían una alternativa menos costosa. La envergadura de la presente monografía no abarca una discusión de tales opciones técnicas.
Conexiones a materias curriculares
El programa de robótica TangibleK está diseñado explícitamente para tratar “las letras centrales perdidas” de STEM en la educación infantil: la T (tecnología) y la E (sigla en inglés de ingeniería). Sin embargo, para que el programa pueda adoptarse exitosamente en el salón de clases, tendrá que integrar y facilitar la introducción de otro material del currículo, tanto temas como conceptos y habilidades de las disciplinas (Bers et al., 2002). En la Tabla 3 se presentan posibles conexiones interdisciplinarias entre las ideas poderosas del programa TangibleK y otras materias.
| Idea poderosa | Descripción | Conexiones interdisciplinarias |
|---|---|---|
Secuenciar/ Estructuras de control |
Una secuencia de instrucciones se puede describir en un programa y las puede llevar a cabo un robot según la secuencia. |
|
Circuitos |
Las secuencias de instrucciones pueden modificarse para repetirse indefinidamente o de manera controlada. |
|
Parámetros |
Algunas instrucciones pueden calificarse con información adicional. |
|
Bifurcaciones |
Algunas instrucciones de un programa hacen preguntas y, de acuerdo con la respuesta, hacen que el robot haga una cosa u otra. |
|
Sensores |
Varios aparatos miden un cambio en el ambiente y lo convierten en una señal que un observador, un instrumento o un robot puede leer. |
|
El programa de robótica TangibleK y las pautas de aprendizaje
Las ideas poderosas que subyacen el currículo de TangibleK están alineadas a las pautas desarrolladas por la International Technology Education Association (ITEA, o Asociación Internacional de Educación en Tecnología; 2007) (http://www.iteea.org/TAA/PDFs/xstnd.pdf) y el 2006 Massachusetts Science and Technology/Engineering Curriculum Framework (Sistema conceptual de ciencia, tecnología e ingeniería de Massachusetts del 2006) (http://www.doe.mass.edu/frameworks/current.html). Los dos conjuntos de pautas enfatizan la importancia de aprender sobre los componentes de la ingeniería y el diseño en sus parámetros para clases del kindergarten al segundo grado:
- La gente hace planes para completar tareas y lograr metas. (Pauta 2E; K–2)
- Todo el mundo puede diseñar soluciones para un problema. (Pauta 8A; K–2)
- El diseño es un proceso creativo (que conduce a productos y sistemas útiles). (Pauta 8B; K–2)
- El proceso de diseño de la ingeniería incluye identificar un problema, buscar ideas, desarrollar soluciones y relatar las soluciones a otros. (Pauta 9A; K–2)
- Hacer preguntas y observaciones ayuda a una persona a discernir cómo funcionan las cosas. (Pauta 10A; K–2)
En la Tabla 4 se muestran las conexiones entre conceptos y habilidades que deben tratarse en las clases, según las pautas de ITEA y el Sistema Conceptual de Tecnología e Ingeniería de Massachusetts.
| Idea poderosa | Pautas de ITEA | Sistema Conceptual de Tecnología e Ingeniería de Massachusetts |
|---|---|---|
Construcción |
|
|
Robótica |
|
|
Programación |
|
|
Sensores |
|
|
Evaluación
El sistema conceptual PTD, descrito anteriormente, contiene normas de guía tanto para diseñar el programa instructivo como para evaluar el aprendizaje y desarrollo de los niños. La creación del contenido y la creatividad (las primeras dos de las “seis ces”) se evalúan según la manifestación de aptitud, o grado de entendimiento, y la confianza al trabajar en la materia. Se utilizan los siguientes factores para evaluar la creación del contenido y la creatividad:
- Los archivos o portafolios de los alumnos; abarcan sus diarios del diseño, muestras de su código de programación, y sus proyectos de robótica. Se evalúan cambios a través del tiempo en el grado de sofisticación y complejidad.
- Diarios en vídeo; grabaciones realizadas en al menos tres momentos durante el programa (por ej., al principio, en medio y al final) en que los niños muestran los proyectos en lo que han trabajado y explican sus actividades.
- Esquema SSS de niveles de entendimiento; conjunto de preguntas que el maestro o el investigador completará al final de cada sesión para evaluar el grado de entendimiento de cada niño (sintáctico, semántico o sistemático, y las transiciones entre niveles) según una escala que va de 0 a 5, para cada objetivo de aprendizaje del currículo y para cada tarea con diversos niveles de complejidad. El siguiente ejemplo consta del esquema de evaluación para la sesión 2, durante la cual los niños programan sus robots para bailar el Hokey-Pokey y se introduce la idea poderosa que “la secuencia o el orden de las instrucciones es importante”, concepto clave del pensamiento computacional.
Parte 1: Marque con un círculo el nivel correspondiente al logro de cada niño respecto a cada frase. Marque NA si la frase no podía evaluarse durante esta actividad.
| 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|
| Logra sin ayuda | Logra con un mínimo de ayuda | Logra con ayuda ocasional | Logra con ayuda considerable | Logra con instrucciones de cada paso | No logra |
| A. Trabaja con propósito para alcanzar la meta de la actividad. | 5 4 3 2 1 0 NA |
| B. Trabaja con propósito para alcanzar una meta auto-escogida. Si es aplicable, ¿cuál fue la meta? | 5 4 3 2 1 0 NA |
| Si trabaja para alcanzar una meta de la propia elección, puede articular la meta. | 5 4 3 2 1 0 NA |
| Expresa sus ideas en código para que el robot las lleve a cabo. | 5 4 3 2 1 0 NA |
| Arregla bloques o iconos en una secuencia sintácticamente correcta para hacer un programa funcional. | 5 4 3 2 1 0 NA |
| A. Reconoce acciones o secuencias incorrectas en un programa al leer el programa u observar al robot mientras lo ejecuta. | 5 4 3 2 1 0 NA |
| B. Forma una hipótesis sobre el problema. | 5 4 3 2 1 0 NA |
| C. Intenta resolver el problema. | 5 4 3 2 1 0 NA |
| Escoge las instrucciones correctas para el programa según las acciones correspondientes de las mismas. | 5 4 3 2 1 0 NA |
| El robot se mantiene íntegro físicamente al ser manipulado y al ejecutar programas. | 5 4 3 2 1 0 NA |
| Comprende que los programas elaborados con el TUI y el GUI tienen que ser interpretados y enviados al robot por la computadora. | 5 4 3 2 1 0 NA |
Parte 2: Haga a cada niño preguntas como: “Cuando haces un programa, ¿importa en qué orden pones los bloques?” para suplementar los diarios de los alumnos, las observaciones de los maestros y sus conversaciones con los alumnos durante el trabajo y los momentos de discusión grupal. Indique el grado de comprensión de los alumnos respecto a cómo programar un robot según los siguientes criterios de evaluación.
Sintáctica: |
Entiende la función de instrucciones individuales, pero no entiende cómo escogerlas y secuenciarlas para hacer un programa funcional que logre una meta dada. |
Semántica: |
Escoge instrucciones apropiadas para el programa y las pone en la secuencia correcta. Entiende que se produce un resultado general armando las partes de maneras determinadas. Tal vez no pueda crear un programa que logre cabalmente la meta dada, o tal vez no se dé cuenta cuando sí se logre. |
Sistemas: |
Entiende la función de cada elemento y que la secuencia en la que se arreglan los elementos produce un resultado final específico. Puede arreglar con propósito las instrucciones correctas en la secuencia correcta para que el programa logre la meta dada. |
La mayoría de los niños no caen precisamente en ninguna de estas categorías, sino en las transiciones entre las mismas. Se está utilizando actualmente el análisis de datos para construir trayectorias del aprendizaje.
Se evalúan la colaboración y la comunicación de los niños examinando sus niveles de altruismo y conexión al analizar las redes de colaboración a través del tiempo (Lee y Bers, 2010) y la participación de los niños en los grupos de conversación tecnológica.
Finalmente, se evalúan la formación de comunidades y las decisiones sobre la conducta analizando la participación e interés general del niño en el programa TangibleK y sus contribuciones al ambiente de aprendizaje, sobre todo durante el proyecto final presentado en el evento de exposición. Las placas de pericia se perciben como representativas de los rasgos del carácter del niño. Se analizan los cambios que ocurren a través del tiempo.
A diferencia de la mayoría de los programas enfocados en la habilidad tecnológica, la evaluación en el programa TangibleK no sólo trata la dimensión cognitiva, sino también se extiende hacia las dimensiones sociales y morales de la experiencia del niño mediante la tecnología y con ella, a fin de ayudarlo a desarrollarse de manera integral y holística.
El programa de robótica TangibleK se orienta según dos metas de evaluación en relación con la investigación. La primera es dar un relato sistemático y basado en evidencia del aprendizaje de los niños y su uso de las ideas poderosas identificadas en el currículo, al emplear métodos descritos anteriormente que corresponden a componentes del sistema conceptual del Desarrollo Tecnológico Positivo, o PTD. La segunda meta es establecer potenciales trayectorias de aprendizaje en ese contexto disciplinario tomando en cuenta las progresiones del desarrollo y los fundamentos epistemológicos, además de diseñar actividades o tareas determinadas con niveles incrementales de dificultad, correspondientes a las ideas poderosas de la robótica y a los niveles de entendimiento de los niños (Clements y Sarama, 2004; Clements y Sarama, 2009). La envergadura del presente artículo no abarca una descripción de la investigación implicada en este programa. El trabajo futuro relacionado a la robótica de TangibleK se enfocará en desarrollar nuevos módulos curriculares, implementar un sistema menos costoso de robótica que usa materiales comunes, y construir un modelo teórico fiable para trayectorias de aprendizaje en esta materia.
Conclusión
Estos son momentos difíciles para la educación infantil. Las demandas académicas de requisitos federales puede que sean contrarias a una preocupación creciente sobre el respeto por las necesidades de los niños según su grado de desarrollo. Para avanzar la habilidad tecnológica de la juventud de nuestra nación, tenemos que empezar durante los primeros años de vida. Sin embargo, no se ha vuelto a examinar profundamente el contenido que los niños pequeños son capaces de aprender, sobre todo en las materias de la tecnología y la ingeniería. Tampoco contamos con una base de investigación suficiente para evaluar lo que los niños son capaces de aprender con tecnologías innovadoras y cómo lo aprenden. La investigación del programa de robótica TangibleK, y el desarrollo del mismo, contribuyen a la base de investigación relacionada a traer ideas de la informática y la ingeniería a clases para niños pequeños. La experiencia hasta la fecha con el programa TangibleK sugiere que cuando reciben tecnologías, currículos y pedagogías apropiados a su edad, los niños pequeños pueden participar activamente en la programación de computadoras y actividades de robótica de maneras compatibles con la práctica apropiada al desarrollo.
Reconocimientos
Deseo agradecerles sinceramente a mis estudiantes del Grupo de Investigación de Tecnologías del Desarrollo en la Universidad Tufts: Jordan Crouser, Rachael Fein, Louise Flannery y Elizabeth Niro, quienes trabajaron todos en facetas diferentes de este proyecto. También deseo agradecerle a mi estudiante pasado y colega actual en la Universidad Northwestern, Mike Horn, por desarrollar TERN mientras estudiaba para el doctorado en Tufts, y por ayudarme a comenzar este proyecto; y a mis colegas Robert Jacob del Human-Computer Interaction Laboratory (Laboratorio de Interacción entre Humanos y Computadoras) y Chris Rogers de CEEO en la Universidad Tufts. Finalmente, agradezco a National Science Foundation su apoyo de esta investigación (NSF Grant DRL-0735657 y NSF Career award IIS-0447166). Cualquier opinión, conclusión, recomendación o hallazgo expresado en el presente artículo es el de la autora y no necesariamente refleja los puntos de vista de la National Science Foundation.
Referencias
Bers, Marina Umaschi, & Urrea, Claudia. (2000). Technological prayers: Parents and children exploring robotics and values. In Allison Druin & James Hendler (Eds.), Robots for kids: Exploring new technolgies for learning (pp. 194-217). San Francisco: Morgan Kaufmann.
Bers, Marina Umaschi. (2006). The role of new technologies to foster positive youth development. Applied Developmental Science, 10(4), 200-219.
Bers, Marina Umaschi. (2008a). Blocks to robots: Learning with technology in the early childhood classroom. New York: Teachers College Press.
Bers, Marina U. (2008b). Engineers and storytellers: Using robotic manipulatives to develop technological fluency in early childhood. In Olivia N. Saracho & Bernard Spodek (Eds.), Contemporary perspectives on science and technology in early childhood education (pp. 105-125). Charlotte, NC: Information Age.
Bers, Marina Umaschi. (2010). When robots tell a story about culture...and children tell a story about learning (pp. 227-247). In Nicola Yelland (Ed.), Contemporary perspective on early childhood education. Maidenhead, UK: Open University Press.
Bers, Marina Umaschi, & Horn, Michael S. (2010). Tangible programming in early childhood: Revisiting developmental assumptions through new technologies. In Irene R. Berson & Michael J. Berson (Eds.), High-tech tots: Childhood in a digital world (pp. 49-70). Greenwich, CT: Information Age.
Bers, Marina; Doyle-Lynch, Alicia; & Chau, Clement. (in press). Positive technological development: The multifaceted nature of youth technology use towards improving self and society. In Cynthia Carter Ching & Brian Foley (Eds.), Technology, learning, and identity: Research on the development and exploration of selves in a digital world. Cambridge: Cambridge University Press.
Bers, Marina U.; Ponte, Iris; Juelich, Katherine; Viera, Alison; & Schenker, Jonathan. (2002). Teachers as designers: Integrating robotics into early childhood education. Information Technology in Childhood Education Annual, 123-145.
Blikstein, Paulo; Buechley, Leah; Horn, Michael; & Raffle, Hayes. (2010). A new age in tangible computational interfaces for learning. In K. Gomez, L. Lyons, & J. Radinsky (Eds.), Proceedings of the 9th International Conference of the Learning Sciences (Vol. 2, pp. 130-132). Chicago: International Society of the Learning Sciences.
Brosterman, Norman. (1997). Inventing kindergartem. New York: H.N. Abrams.
Cejka, Erin; Rogers, Chris; & Portsmore, Merredith. (2006). Kindergarten robotics: Using robotics to motivate math, science, and engineering literacy in elementary school. International Journal of Engineering Education, 22(4), 711-722.
Clements, Douglas H. (1999). The future of educational computing research: The case of computer programming. Information Technology in Childhood Education Annual, 147-179.
Clements, Douglas H., & Sarama, Julie (Eds.). (2004). Hypothetical learning trajectories. Mathematical Thinking and Learning [Special issue], 6(2).
Clements, Douglas H., & Sarama, Julie. (2009). Learning and teaching early math:The learning trajectories approach. New York: Routledge.
Craig, John J. (2005). Introduction to robotics. Upper Saddle River, NJ: Pearson Prentice Hall.
Damon, William. (2004). What is positive youth development? Annals of the American Academy of Political and Social Science, 591(1), 13-24.
Horn, Michael S.; Bers, Marina U.; & Jacob, Robert J. K. (2009, April). Tangible programming in education: A research approach. Paper presented at CHI '09. Boston, MA.
Horn, Michael S., & Jacob, Robert J. K. (2007). Designing tangible programming languages for classroom use. In Brygg Ullmer, Albrecht Schmidt, Eva Hornecker, Caroline Hummels, Robert J. K. Jacob, & Elise van den Hoven, TEI ’07: Proceedings of the First International Conference on Tangible and Embedded Interaction (pp. 159-162). New York: Association for Computing Machinery.
Horn, Michael S.; Crouser, R. Jordan; & Bers, Marina U. (in press). Tangible interaction and learning: The case for a hybrid approach. Personal and Ubiquitous Computing [Special issue on tangibles and children].
International Technology Education Association (ITEA). (2007). Standards for technological literacy: Content for the study of technology (3rd ed.). Reston, VA: Author.
Kafai, Yasmin B., & Resnick, Michael. (1996). Constructionism in practice: Designing, thinking, and learning in a digital world. Mahwah, NJ: Erlbaum.
Kantor, Rebecca; Elgas, Peggy M.; & Fernie, David E. (1989). First the look and then the sound: Creating conversations at circle time. Early Childhood Research Quarterly, 4(4), 433-448.
Kay, Alan C. (2003). Interview with Alan Kay. Computers in Entertainment, 1(1), 8.
Larson, Reed W. (2000). Toward a psychology of positive youth development. American Psychologist, 55(1), 170-183.
Lee, K. T., Bers, Marina. (2010). Collaboration by design: Using robotics to foster social interaction in kindergarten. Manuscript submitted for publication.
Lerner, Richard M.; Almerigi, Jason B.; Theokas, Christina; & Lerner, Jacqueline V. (2005). Positive youth development: A view of the issues. Journal of Early Adolescence, 25(1), 10-16.
Martin, Fred; Mikhak, Bakhtiar; Resnick, Mitchel; Silverman, Brian; & Berg, Robbie. (2000). To mindstorms and beyond: Evolution of a construction kit for magical machines. In Allison Druin & James Hendler (Eds.), Robots for kids: Exploring new technolgies for learning (pp. 9-33). San Francisco: Morgan Kaufmann.
Massachusetts Department of Education. (2006, October). Massachusetts science and technology/engineering curriculum framework. Retrieved October 7, 2010, from http://www.doe.mass.edu/frameworks/current.html
McNerney, Timothy S. (2004). From turtles to tangible programming bricks: Explorations in physical language design. Personal and Ubiquitous Computing, 8(5), 326-337.
Papert, Seymour. (1980). Mindstorms: Children, computers, and powerful ideas. New York: Basic Books.
Papert, Seymour. (1993). The children’s machine: Rethinking school in the age of the computer. New York: Basic Books.
Papert, Seymour. (2000). What’s the big idea: Towards a pedagogy of idea power. IBM Systems Journal, 39(3-4), 720-729.
Pearson, Greg, & Young, Thomas A. (2002). Technically speaking: Why all Americans need to know more about technology. Washington DC: National Academy Press.
Perlman, Radia. (1976). Using computer technology to provide a creative learning environment for preschool children. AI Memo 360: Logo Memo No. 24. Cambridge, MA: MIT Artificial Intelligence Laboratory.
Random House Webster’s Unabridged Dictionary. (2006). New York: Random House.
Repenning, Alexander; Webb, David; & Ioannidou, Andri. (2010). Scalable game design and the development of a checklist for getting computational thinking into public schools. SIGCSE 2010: Proceedings of the 41st ACM technical symposium on computer science education. New York: Association for Computing Machinery.
Resnick, Mitchel. (1996). New paradigms for computing, new paradigms for thinking. In Yasmin B. Kafai & Mitchel Resnick (Eds.), Constructionism in practice: Designing, thinking, and learning in a digital world. Mahwah, NJ: Erlbaum.
Resnick, Mitchel. (2003). Playful learning and creative societies. Education Update, 8(6), Retrieved May 1, 2009, from http://web.media.mit.edu/~mres/papers/education-update.pdf
Resnick, Mitchel; Berg, Robbie; & Eisenberg, Michael. (2000). Beyond black boxes: Bringing transparency and aesthetics back to scientific investigation. Journal of the Learning Sciences, 9(1), 7-30.
Resnick, Mitchel; Maloney, John; Monroy-Hernández, Andrés; Rusk, Natalie; Eastmond, Evelyn; Brennan, Karen; Millner, Amon; Rosenbaum, Eric; Silver, Jay; Silverman, Brian; & Kafai, Yasmin. (2009). Scratch: Programming for all. Communications of the ACM, 52(11), 60-67.
Rinaldi, Carlina. (1998). Projected curriculum constructed through documentation—Progettazione: An interview with Lella Gandini. In Carolyn Edwards, Lella Gandini, & George Forman (Eds.), The hundred languages of children: The Reggio Emilia approach—Advanced reflections (2nd ed., pp. 113-126). Greenwich, CT: Ablex.
Rogers, Chris, & Portsmore, Merredith. (2004). Bringing engineering to elementary school. Journal of STEM Education, 5(3-4), 17-28.
Rogers, Chris B.; Wendell, Kristen; & Foster, Jacob. (2010). The academic bookshelf: A review of the NAE Report, "Engineering in K-12 education." .Journal of Engineering Education, 99(2), 179-181. RetrievedOctober 6, 2010, from http://findarticles.com/p/articles/mi_qa3886/is_201004/ai_n53931016/
Rogoff, Barbara. (2003). The cultural nature of human development. New York: Oxford University Press.
Rogoff, Barbara; Turkanis, Carolyn Goodman; & Bartlett, Leslee. (2001). Learning together: Children and adults in a school community. New York: Oxford University Press.
Rusk, Natalie; Resnick, Mitchel; Berg, Robbie; & Pezalla-Granlund, Margaret. (2008). New pathways into robotics: Strategies for broadening participation. Journal of Science Education and Technology, 17(1), 59-69.
Scales, Peter C.; Benson, Peter L.; Leffert, Nancy; & Blyth, Dale A. (2000). Contribution of developmental assets to the prediction of thriving among adolescents. Applied Developmental Science, 4(1), 27-46.
Smith, A. C. (2007). Using magnets in physical blocks that behave as programming objects. In Brygg Ullmer, Albrecht Schmidt, Eva Hornecker, Caroline Hummels, Robert J. K. Jacob, & Elise van den Hoven, TEI’07: Proceedings of the First International Conference on Tangible and Embedded Interaction (pp. 147-150). New York: Association for Computing Machinery.
Suzuki, Hideyuki, & Kato, Hiroshi. (1995). Interaction-level support for collaborative learning: Algoblock—an open programming language. In John L. Schnase & Edward L. Cunnius (Eds.), Proceedings of CSCL ’95: The First International Conference on Computer Support for Collaborative Learning (pp. 349-355). Mahwah, NJ: Erlbaum.
Theokas, Christina, & Lerner, Richard M. (2006). Observed ecological assets in families, schools, neighborhoods: Conceptualization, measurement, and relations with positive and negative developmental outcomes. Applied Development Science, 10(2), 61-74.
Turbak, Franklyn, & Berg, Robbie. (2002). Robotic design studio: Exploring the big ideas of engineering in a liberal arts environment. Journal of Science Education and Technology, 11(3), 237–253.
Turkle, Sherry, & Papert, Seymour. (1992). Epistemological pluralism and the revaluation of the concrete. Journal of Mathematical Behavior, 11(1), 3-33.
Wang, X. Christine, & Ching, Cynthia Carter. (2003). Social construction of computer experience in a first-grade classroom: Social processes and mediating artifacts. Early Education and Development, 14(3), 335-361.
Wing, Jeannette M. (2006). Computational thinking. Communications of the ACM, 49(3), 33-35. Retrieved June 10, 2010, from http://www.cs.cmu.edu/afs/cs/usr/wing/www/publications/Wing06.pdf
Wyeth, Peta. (2008). How young children learn to program with sensor, action, and logic blocks. International Journal of the Learning Sciences, 17(4), 517-550.
Información de la autora
La Dra. Marina Umaschi Bers es profesora auxiliar en el Departamento Eliot-Pearson de Desarrollo Infantil y el Departamento de Informática en la Universidad Tufts. Su investigación implica el diseño y el estudio de tecnologías innovadoras de aprendizaje para fomentar el desarrollo juvenil positivo. En la Universidad Tufts, la Profesora Bers encabeza el grupo de investigación interdisciplinaria de Tecnologías del Desarrollo. La Profesora Bers recibió en el 2005 el Presidential Early Career Award for Scientists and Engineers (PECASE, o Galardón Presidencial para Científicos e Ingenieros a Principios de la Carrera Profesional), la mayor honra concedida por el gobierno de los EE. UU. a investigadores sobresalientes durante las etapas iniciales de su carrera profesional. También recibió una galardón de cinco años de National Science Foundation (NSF), Young Investigator's Career Award (Galardón de la Carrera Profesional de Investigadores Jóvenes) y el Jan Hawkins Award for Early Career Contributions to Humanistic Research and Scholarship in Learning Technologies (Galardón Jan Hawkins de Contribuciones al Principio de la Carrera Profesional a la Investigación y Erudición Humanista en las Tecnologías de Aprendizaje) de American Educational Research Association (AERA, o Asociación Estadounidense de Investigación Educativa). Durante los últimos 14 años, la Profesora Bers ha concebido y diseñado diversas herramientas tecnológicas, desde la robótica hasta mundos virtuales. Ha realizado estudios en programas extracurriculares, museos y hospitales, además de escuelas en los Estados Unidos y otros países. Su libro Blocks to Robots: Learning with Technology in the Early Childhood Classroom (Desde bloques hasta robots. El aprendizaje con la tecnología en clases para niños pequeños) fue publicado por Teachers College Press en 2008. Su libro más reciente, Positive Uses of New Technologies: The Design of Digital Experiences for Youth Learning and Development (Usos positivos de tecnologías nuevas. El diseño de experiencias digitales para el aprendizaje y desarrollo de jóvenes), será publicado en 2012 por Oxford University Press. La Dra. Bers es de Argentina, donde realizó los estudios sub-graduados en comunicación social en la Universidad de Buenos Aires. En 1994 vino a los Estados Unidos, donde recibió una maestría en medios y tecnologías pedagógicos de la Universidad Boston y una maestría de ciencias y un doctorado del Media Laboratory (Laboratorio de Medios Tecnológicos) de MIT trabajando con Seymour Papert. Para más información acerca de la Dra. Bers, sírvase visitar http://www.tufts.edu/~mbers01/.
Marina U. Bers, Ph.D.
Associate Professor
DevTech Research Group
Eliot Pearson Department of Child Development
Computer Science Department
Tufts University
105 College Ave
Medford, MA 02155
Telephone: 617-627-4490
Fax: 617-627-3503
Email: Marina.Bers@tufts.edu